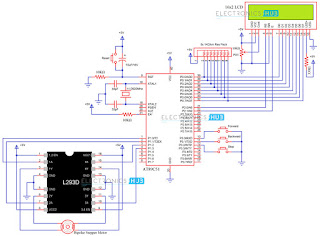
วงจรขับ LED สองขั้ว

Components Required 8051 Microcontroller (AT89C51 is used here) Programmer for 8051 Microcontroller 11.0592 MHz Crystal Capacitors – 2 X 33pF, 10µF Resistors – 150Ω, 10KΩ X 2 Push Buttons X 3 Bipolar LED (two leads) Connecting Wires Breadboard Power Supply Code #include<reg51.h> sbit red = P0^0; sbit green = P0^1; sbit red_switch = P0^6; sbit green_switch = P0^7; unsigned char i=0; void delay (int); void main() { red=0; green=0; while(1) { red=0; green=0; while(1) { if(red_switch==0) { green=0; red=1; while(red_switch==0); } else if(green_switch==0) { green=1; red=0; while(green_switch==0); } } }