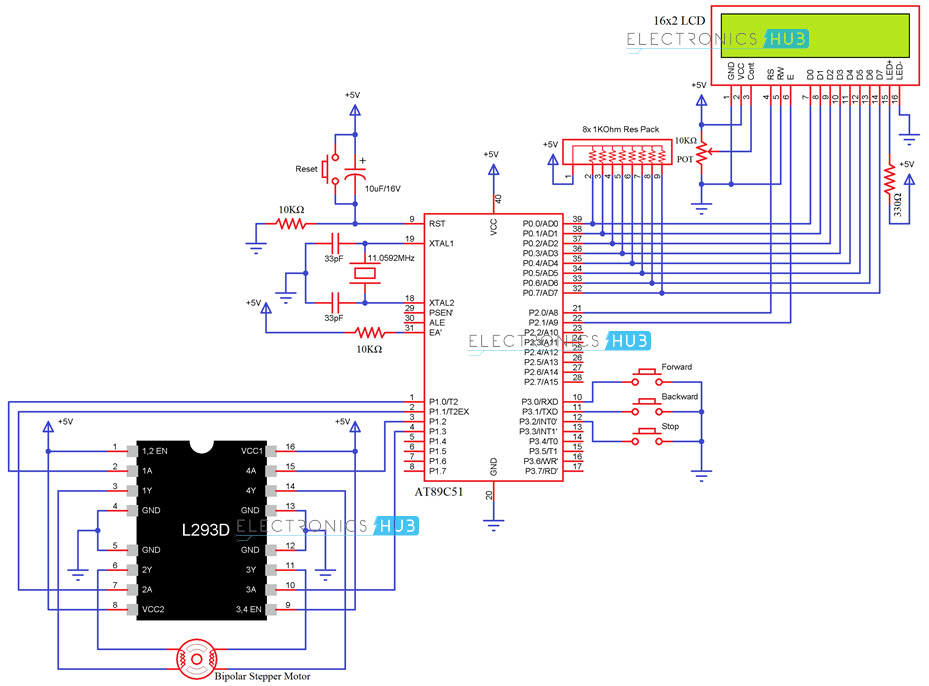
การควบคุมมอเตอร์โดยใช้ไมโครคอนโทรลเลอร์ 8051 & L293D
ส่วนประกอบที่จำเป็น
AT89C51 (8051 Microcontroller)L293D Motor Driver
5V Bipolar Stepper Motor
16X2 LCD Diaplay
11.0592 MHz Quartz Crystal
10KΩ Resistors X 2
10KΩ POT
8x 1KΩ Resistor Pack
33pF Ceramic Capacitors X 2
10μF/16V Capacitor
Push Buttons X 4
330Ω Resistor
5V Power Supply
Code
#include<reg51.h>
#define lcd P0
sbit rs=P2^0;
sbit e=P2^1;
sbit sw1=P1^2;
sbit sw2=P1^1;
sbit sw3=P1^3;
sbit sw4=P1^0;
sbit forward = P3^0;
sbit backward = P3^1;
sbit stop = P3^2;
void delay (int);
void cmd (unsigned char);
void display (unsigned char);
void string (char *);
void init (void);
void delay (int d)
{
unsigned char i;
for(;d>0;d--)
{
for(i=250;i>0;i--);
for(i=248;i>0;i--);
}
}
void cmd (unsigned char c)
{
lcd=c;
rs=0;
e=1;
delay(10);
e=0;
}
void display (unsigned char c)
{
lcd=c;
rs=1;
e=1;
delay(10);
e=0;
}
void string (char *p)
{
while(*p)
{
display(*p++);
}
}
void init (void)
{
cmd(0x38);
cmd(0x0c);
cmd(0x01);
cmd(0x80);
}
void main()i
{
int z=0;
init();
P3=0xff;
P1=0x00;
abc:
cmd(0x80);
while(stop==0);
string("Press Forward Or");
cmd(0xc0);
string("Backward To Run");
forward=1;
backward=1;
while(1)
{
if(forward==0)
{
cmd(0x01);
cmd(0x80);
string("Running Forward");
while(forward==0);
while(1)
{
z++;
if(z==1)
{
sw1=1;sw2=0;sw3=0;sw4=0;delay(30);
if(backward==0 || stop==0)
break;
while(1)
{
if(forward==0)
{
cmd(0x01);
cmd(0x80);
string("Running Forward");
while(forward==0);
while(1)
{
z++;
if(z==1)
{
sw1=1;sw2=0;sw3=0;sw4=0;delay(30);
if(backward==0 || stop==0)
break;
break;
}
else if(z==6)
{
sw1=0;sw2=0;sw3=1;sw4=1;delay(30);
if(backward==0 || stop==0)
break;
}
else if(z==7)
{
sw1=0;sw2=0;sw3=0;sw4=1;delay(30);
if(backward==0 || stop==0)
break;
}
else if(z==8)
{
z=0;
sw1=1;sw2=0;sw3=0;sw4=1;delay(30);
if(backward==0 || stop==0)
break;



ความคิดเห็น
แสดงความคิดเห็น